
운송용 조종사 ATPL 구술 (4)
– Takeoff Segment 각 구간에 대해서
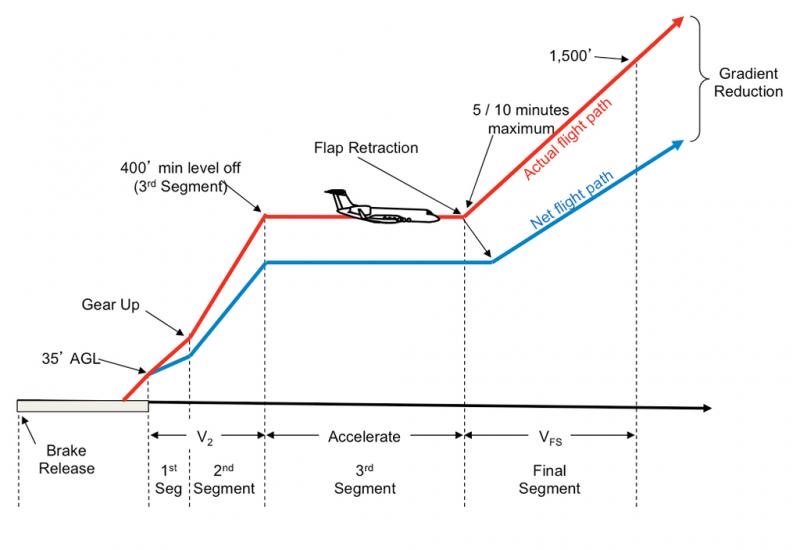
1st Segment
항공기가 지표면에서 35ft 상공에 도달했을 때부터 Landing Gear가 Retract까지고 Gear-up까지 Takeoff Safety Speed인 V2 Speed를 유지해서 상승해야 합니다.
상승 속도를 높이고 항력을 감소시키는 것에 목적이 있는 구간으로 항력을 감소시킬 수 있는 방법은 Gear-up과 Flap Retracting이지만 저고도에서 Flap Retracting은 추천하지 않는습니다.
2nd Segment
Landing Gear가 완전히 Retract 되면 시작되며 V2 Speed를 계속 유지하고 400ft AGL 또는 통상 Flap Retract가 되는 고도에서 Segment 2가 종료됩니다.
Accelerating 후 Flap을 Retract하는 것이 중요한 구간으로 상승 경사도는 2.4%보다 감소되면 안되며 주변 장애물로부터 Clearance를 확보하는 것이 2nd Segment 목적입니다.
3rd Segment
400ft AGL 또는 Flap Retract가 시작되는 고도부터 Maximum Continuous Thrust를 Set하면 종료됩니다. Flap이 Retract되고 항공기를 가속시키는 것이 목적인 구간입니다.
4th Segment
Flap이 Retract되고 Maximum Continuous Thrust를 Set하고 난 뒤의 구간이며 Climb Gradient가 1.2% 이하가 되지 않도록 주의하며 비행장 상공 1500ft AGL 이상까지 상승하는 구간입니다.
– Screen Height 란?
Class A 항공기는 35ft, Class B 항공기는 50ft, Wet Runway인 경우 15ft가 Screen Height가 되며 이 높이에 도달 전에 항공기는 반드시 V2 Speed에 도달하고 V2 Speed를 유지
※ Screen Height는 DER 또는 Clearway 상공의 고도
The Landing Screen Height는 50ft로 모든 Class 항공기가 동일합니다.
Takeoff Distance Required (TODR)은 Brake를 Release한 시점부터 Screen Height고도까지의 거리
– Cost index
CI는 시간과 관련있는 비용(분단위)을 연료와 관련있는 비용(kg단위)으로 나눠서 얻는 값입니다.
A320은 0부터 999까지 입력 가능
– Tail Pipe Fire시 조치는?
엔진의 정상적인 가스 흐름 경로 내에서 발생하는 화재로 지상에서만 발생하며 엔진 시동 또는 엔진 정지 중에 주로 발생합니다.
화재는 엔진 코어 내부에 위치하고 있어 엔진 화재 경고 시스템이 작동하지 않아 조종사가 화재를 인지하기 어렵습니다. (Ground Report or Increase EGT로 알 수 있다.)
점화되는 연소실, 터빈에 과도한 연료로 인해서 발생할 수 있고 웬만해서는 엔진 손상으로 발생하지는 않으나 Flap과 같은 다른 항공기 구성 요소를 손상시킬 수 있습니다.
지상 요원이나 ATC, 객실 승무원에 의해 육안으로 식별하는 경우가 가장 많으며 조종실 운항 승무원에게 엔진 화재로 보고되는 경우가 많은데 조종사는 Tail Pipe Fire 절차 대신 엔진 화재 절차를 잘못 적용하는 경우가 많습니다.
운항 승무원은 Tail Pipe Fire가 인지되면 시동을 중단하거나 종료하여 엔진으로의 연료 흐름을 중지시키고 엔진 Parameter을 Motoring하여 화염을 진압하고 엔진에서 남은 연료를 제거해서 진화해야 합니다.
– PBCS에 대해 설명 (Performance Based Communication and Surveillance)
* ICAO Document 9869에서 더 자세한 설명을 찾을 수 있습니다.
통신 요소인 성능기반항공통신인 필수통신성능(RCP) 사양에 따라 운영 기준을 정리하고 평가하며, 감시 요소인 성능기반감시인 필수감시성능(RSP)에 의해 운영기준과 평가를 정의하여 항공교통 증가와 공역 이용을 최적화를 제공하는 개념
PBCS를 제공하기 위한 항공기 성능은 통신, 항행, 감시 기능이 모두 가능한 FANS 1/A를 충족해야 하고 FANS 1/A는 항공기의 데이터링크 시스템, 그리고 항공기를 상대하는 관제기관의 시스템, 그리고 이를 바탕으로 데이터링크 통신이 특정 기준을 충족하며 잘 운영된다는 ‘상태’를 뜻한다.
CPDLC, ADS-C, SATVOICE등의 시스템이 잘 갖춰져야 하며 비행계획서에 PBN 장비를 표기하듯 PBCS 및 데이터링크 시스템과 관련 있는 장비 목록을 적어야 한다.
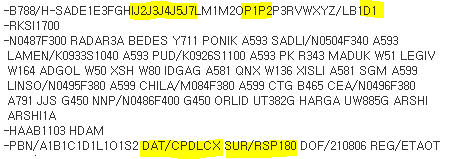
– RCP, RSP의 SPEC은 얼마인가?
RCP는 RCP240, RCP400이 있고 RCP400은 절차수행을 포함, 종료까지 소요되는 시간이 400초 이내임을 의미
RSP는 RSP180과 RSP400이 있고 RSP180은 관제사가 항공기 위치를 요청한 후 최종 관제사에게 정보가 도달하는 소요시간이 180초 이내임을 의미
– PBN SPEC은 어떻게 되죠?
RNAV, RNP로 분류
– PBN, RNAV와 RNP
계기비행 초기에는 VOR, DME, NDB등의 NAVAIDS를 이용하는 전통적인 항법 (Conventional Navigation)이었다면, 상대적인 개념 또는 Upgrade된 항법으로 나타난 것이 RNAV (Area Navigation), RNP이고 이들을 통합한 것이 PBN입니다.
▪ PBN (Performance-based Navigation, 성능기반항법)
계기접근절차 또는 지정된 공역, ATS 항로를 운항하는 항공기가 갖추어야 하는 성능 요건 (Performance Requirement)을 기반으로 한 항법을 말합니다.
▪ RNAV (Area Navigation, 지역항법)
지상 또는 위성항행안전시설의 적용범위 내 또는 항공기 자체에 설치된 항행안전보조장치의 성능한도 내 또는 이들의 혼합된 형식의 항행안전보조장치의 적용범위 내에서 어느 특정성능(비행시간의 최소 95%이상의 오차범위 보장)이 요구되는 비행구간에서 항공기의 운항이 가능하도록 허용한 항행방법을 말한다.
▪ RNP (Required Navigation Performance)
RNAV 사양에서 OMPA 요구사항을 포함한 것이 RNP입니다.
※ 차이점은 OPMA의 여부 외에 RNAV는 GNSS가 없어도 항법이 가능하다도 큰 차이점
※ PBN은 RNAV와 RNP로 구분하고 비행 방식 면에서는 동일
– RNAV: 항공기에 RNAV 시스템만 갖춘 항행시스템
– RNP: RNAV + GNSS + OPMA 기능
– OPMA란?
Onboard Performance Monitoring and Alerting으로 RNAV은 지정된 경로를 벗어날 경우 확인할 수 있는 방법이 없어 관제사의 지속적 감시가 필요하게 되는데 이런 단점을 극복하기 위해 항행 정확도를 지속적으로 감시하고 허용치를 초과하게 되면 조종사에게 자동으로 경고하여 대응할 수 있는 장비(OPMA)가 개발되었습니다. 이로 인해 RNAV보다 발전된 RNP가 등장할 수 있었습니다.
평가관님: ”RNP는 OPMA가 있다고 Non-Radar에서 가능한 것으로 많이들 잘못 알고 있다. 그리고 관제용 레이더는 세계적으로 없어지는 추세이고, ADS-B로 더 자세히 보면서 관제하기 시작했다.”
– R220 항로의 RNP는? 분리 거리는?
RNP4이고 30NM (RNP 4는 ADS-C 및 CPDLC필요 분리는 50NM/30NM)
– RNAV RNP Spec에 뭐가 있나요? (RNAV 4개 RNP 7개)
RNAV1, RNAV2, RNAV5, RNAV10, RNP1, RNP2, RNP4, RNP0.3, RNP Approach, RNP AR Approach, A-RNP
– RNAV (GPS)와 RNAV (RNP) 구별하는 방법
Chart
– IAF, FAF 사이와 FAF 이후 RNP값 차이는 어떻게 되죠?
1.0NM in the initial, intermediate and missed approach segment and 0.3NM in the final segment.
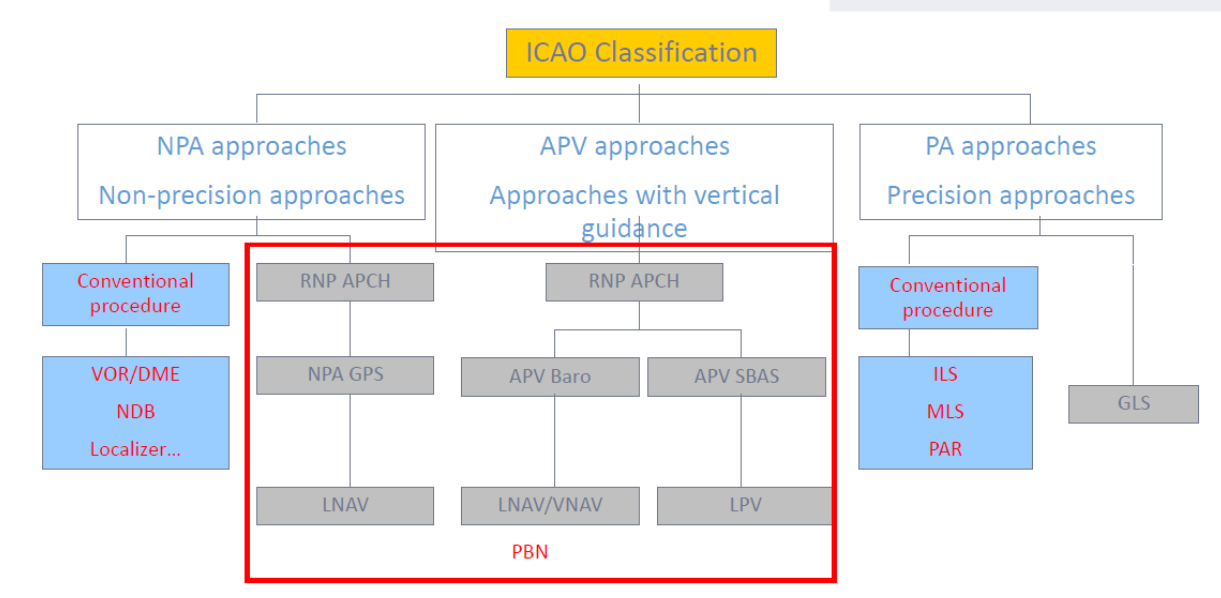
– Approach의 분류
Precision Approach, Non-Precision Approach, Approach with Vertical Guidance
– ABAS, GBAS, SBAS
▪ ABAS (Aircraft Based Augmentation System): GPS 수신기에서 얻어진 위치정보와 기타 A/C 항법장비들로부터 얻어진 정보를 통합하여 정밀한 정보활동이 가능한 System. RAIM과 FDE(Fault Detection Exclusion)이 하위 시스템으로 구성
▪ GBAS(Ground Based Augmentation System): 지상에서 3~4개의 위성신호 수신, 오차보정 후 GBAS에서 20~30NM 이내의 항공기에 보정된 값을 VHF DATA Link로 송신. 오차는 1m 이내로 GLS Approach를 가능하게 함
▪ SBAS (Spaced Based Augmentation System): GPS의 신호를 Master Station으로 전송 후 SBAS Ground Uplink Station으로 SBAS 정지 위성에 전송. 오차 7m 이내로 Enroute에서 CAT 1과 VNAV 접근이 가능하게 함
– ADS-B, ADS-C 각각의 설명과 차이점
▪ ADS-B (Automatic Dependent Surveillance-Broadcast)
GPS 위성항법 시스템과 1,090MHz 전송 링크를 이용하여 항공기 감시 정보를 일정 주기마다 지상의 항공 교통관제 및 다른 항공기에 자동으로 방송하는 항공기 감시 체계임. ADS-B 시스템은 항공기의 감시 정보(항공기 식별 부호, 위치, 속도, 방향 등)를 1초 단위로 지상의 ATC 시스템과 다른 항공기에 방송하고 이용자는 기존의 레이더 기반 항공관제에 의존하지 않고 화면에 표시된 정보를 통해 항공기 주변 감시 정보를 확인할 수 있습니다. 항공기 가시선 미확보로 인한 통신 두절 등 항공기 제한 사항을 최소한으로 줄이고 항공관제 기능을 향상시켜 충돌을 방지할 수도 있습니다.
▪ ADS-C (Automatic Dependent Surveillance-Contract)
지상 센터에서 저주파수로 요청이 있을 때에만 자신의 위치를 송신하는 개인별 감시 시스템이며, 개별 항공기를 선택해 정보를 교류하는 시스템으로 단독으로 사용되기 보다는 관제소와 조종사 간에 DATA LINK Communication을 하는 CPDLC와 같이 사용합니다. 실제로 조종사 관제사 간의 통신과 감시 정보가 확인이 되는 딜레이 시간이 필요하다.
▶ Mode C Transponder를 기반으로 TCAS가 장착된 것과 Mode S Transponder를 기반으로 한 ADS-B의 사용이 가능한 항공기 간에는 많은 차이가 있는데 상호간의 위치, 고도, 속도를 비롯한 여러 가지 데이터를 인공위성과 함께 Mode S Transponder로 주고받는다. ADS-B는 조종사와 조종사 간, ADS-C는 조종사와 관제사간 편의를 도모한 시스템
– RNP AR이란? 비정밀인지 정밀인지, 미국에선 비정밀로 보는지 정밀로 보는지
RNP AR (RNP Authorized Required), 기존의 접근 절차와는 달리 접근 설계에 상용되는 기준으로 항행안전시설의 폭이 넓고, 특히 GNSS를 사용할 수 있는 까닭에 지상항행안전시설들의 위치 제약없이 효율적이고 보다 안전한 접근 절차를 수립할 수 있다는 장점이 있고 RNP AR접근의 경우 직 진입 구간과 Radius-to-Fix 구간이 함께 적용된다는 특징이 있습니다.
– Mach Number Technique이 뭔가요?
터보제트 항공기를 대상으로 동일 항로에서 지정된 마하수를 유지시켜, 동일 고도의 유지, 상승하거나 하강하는 항공기간의 종적 분리시키는 걸 말합니다.
사전 조건으로는 Mach Number 유지를 위한 계기와 감항성, ATC는 반드시 해당 지역의 최신 바람 기상 또는 해당 지역 비행 중인 항공기로부터 정보를 획득해야 하며 해당 정보를 바탕으로 Significant Point부터 Exit Point까지의 예상 시간을 도출해야 하며 조종사는 ATC에 따로 요청하지 않는 한, Step Climb or Descent를 실시할 때에도 해당 속도 유지하여야 합니다.
15분의 종적분리를 기준으로 삼고 있고 우리나라의 경우 10분이 종적분리 기준으로 되어있습니다.
지시된 Mach Number을 유지하고 ETA ±3 또는 그 이상일 경우 ATC에 보고하여야 하며 성능, Turbulence 등의 이유로 지정된 Mach Number 유지 불가 시 ATC에 즉각 통보해야 합니다.
– 마하수 사용 고도?
Crossover Altitude for A320 25,000ft 정도
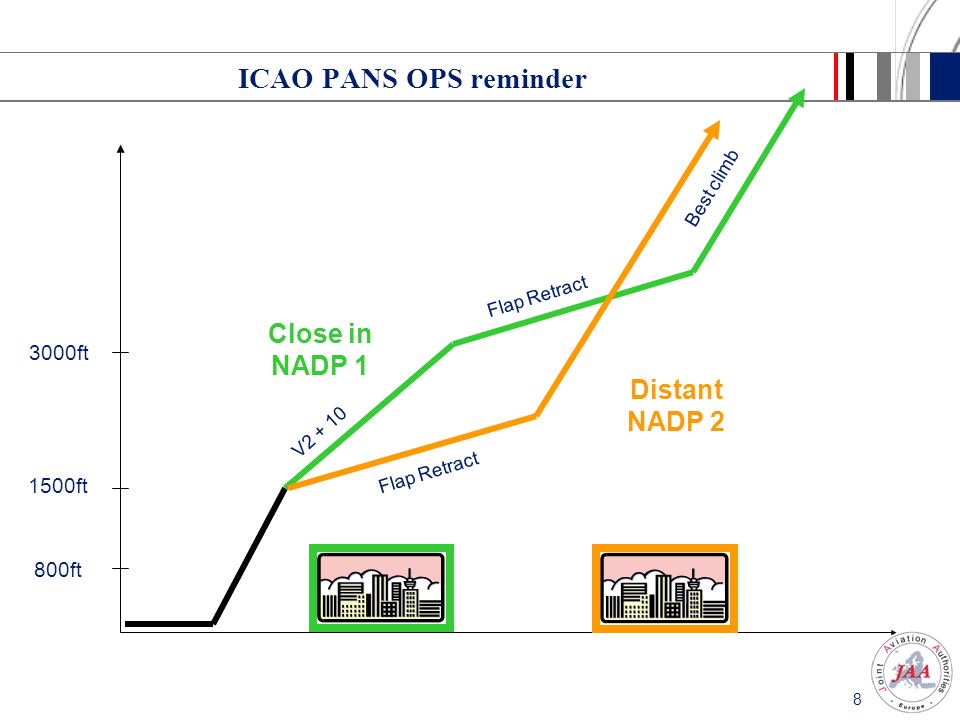
– NADP (Noise Abatement Departure Procedures)
▷ NADP 1
공항에서 가까운 소음 민감지역에 대한 소음 영향을 최소화하기 위한 절차.
가능한 빨리 상승하는데 목적이 있음. 추력경감고도를 최저고도(800ft) 이상으로 설정, 이륙 Flap/Slat을 최고고도(3,000ft)에 도달할 때까지 유지하여 상승률을 유지.
3,000ft 도달 이후 정상 상승속도로 증속하면서 Flap/Slat을 Up.
최소 상승속도는 안전을 고려, V2+10~20Kt 유지
▷ NADP 2
공항에서 멀리 떨어진 소음 민감지역에 대한 소음 영향을 최소화하기 위한 절차.
Flap/Slat을 최저고도(800ft) 이상의 고도에서 VZF (VZeroFlap) 속도로 증속하고 Flap/Slat을 Up
최고고도 3,000ft에 도달하면 정상 상승속도로 증속하며 최소상승속도는 안전을 고려하여 V2 + 10kt보다 적지 않도록 유지한다.
– UPSET의 정의와 기준은?
▷ Upset의 판단 기준
- ▪ Pitch attitude greater than 25° nose up
- ▪ Pitch attitude greater than 10° nose down
- ▪ Bank Angle greater than 45°
- ▪ Less than the above parameters but flying at an airspeed inappropriate for the condition
▷ Upset Recovery Procedure
- ▪ Disconnect the autopilot
- ▪ Apply forward column or stick pressure to unload the airplane
- ▪ Aggressively roll the wings to the nearest horizon
- ▪ Adjust power as necessary by monitoring airspeed
- ▪ Return to level flight
– Grid MORA에서 Marron Color와 Green color의 차이
Marron – 10000ft 이상, Green – 10000ft 미만
– MEA (Minimum Enroute Altitude)란?
MEA는 Minimum En route Altitude로 두 Fix 간 항행신호수신범위와 장애물안전고도를 만족하는 최저고도를 의미합니다.
RNAV MEA를 설정하기도 합니다.
MEA는 지형이나 인공장애물로부터 안전고도, 항법시설성능 적합성, 통신요구사항 등을 고려해서 결정합니다.
항로 좌우 5NM 내 최고 장애물 + 1,000ft의 안전고도를 보장하고 산악지역의 경우 2,000ft의 안전고도를 보장합니다.
– MOCA (Minimum Obstruction Clearance Altitude)란?
항로상 장애물 안전고도를 충족하는 두 지점 간의 최저고도로 VOR에서 22NM범위 안에서는 항행신호의 수신도 보장합니다.
(Chart에선 고도 뒤에 대문자 ‘T’로 표기) 항로 좌우 5NM 내 최고 장애물 + 1,000ft 안전고도를 보장하고 산악지역의 경우 2,000ft의 안전고도를 보장합니다.
안전문제는 없지만 VOR의 Line of sight 특성으로 인해 항법 신호의 수신이 불량할 수도 있습니다.
– MSA (Minimum Sector/Safe Altitude)란?
항법시설 25NM 반경 내에서 장애물을 1,000ft 회피할 수 있는 고도로 최대 4개 섹터로 분리하기도 합니다.
– DA, DH 차이
A(Decision Altitude)나 DH(Decision Height)는 정밀 접근이나 Vertical Guidance가 제공되는 접근을 하는 중에 시각적인 참조물을 확인하지 못했을 때 접근을 포기하고 실패접근을 수행해야 하는 특정 높이 또는 고도를 뜻합니다. ICAO에서 DA는 평균해수면(MSL)을 참조하고, DH는 Threshold 높이를 참조합니다.
– DA, MDA 차이, 강하타성 허용 되는것
MDA/H, 최저강하고도라 함은 직진입 또는 선회 접근 시에 시각 참조물 없이 더 이상 아래로 강하하지 못하도록 지정된 어느 특정 고도 또는 높이를 말합니다. 강하타성은 불가합니다.
※ DA/DH/MDA/MDH 아래로의 강하 조건 [항공안전법 시행규칙 181조]
가. 정상적인 강하율에 따라 정상적인 방법으로 그 활주로에 착륙하기 위한 강하를 할 수 있는 위치에 있을 것
나. 비행시정이 해당 계기접근절차에 규정된 시정 이상일 것
다. 조종사가 다음 중 어느 하나 이상의 해당 활주로 관련 시각참조물을 확실히 보고 식별할 수 있을 것
1) 진입등시스템(ALS): 조종사가 진입등의 구성품 중 붉은색 측면등(Red side row bars) 또는 붉은색 최종진입등(Red terminating bars)을 명확하게 보고 식별할 수 없는 경우에는 활주로의 접지구역 표면으로부터 30미터(100피트) 높이의 고도 미만으로 강하할 수 없다. ALS 만으로 100ft 미만 강하는 불가능
2) 활주로시단 (Threshold)
3) 활주로시단표지 (Threshold marking)
4) 활주로시단등 (Threshold light)
5) 활주로시단식별등
6) 진입각지시등 (VASI 또는 PAPI)
7) 접지구역 (Touchdown zone) 또는 접지구역표지(Touchdown zone marking)
8) 접지구역등 (Touchdown zone light)
9) 활주로 또는 활주로표지
10) 활주로등